



2019 Nye Holybro Pixhawk 4 Mini Autopilot Flight Controller M8N GPS Modul PM06 strømstyring til RC Drone
Reference: i927
Tilstand : Ny vare
kr1 283.80- kr1 206.77
Holybro Pixhawk 4 Mini Autopilot Flight Controller M8N GPS Modul PM06 strømstyring til RC Drone
Beskrivelse:
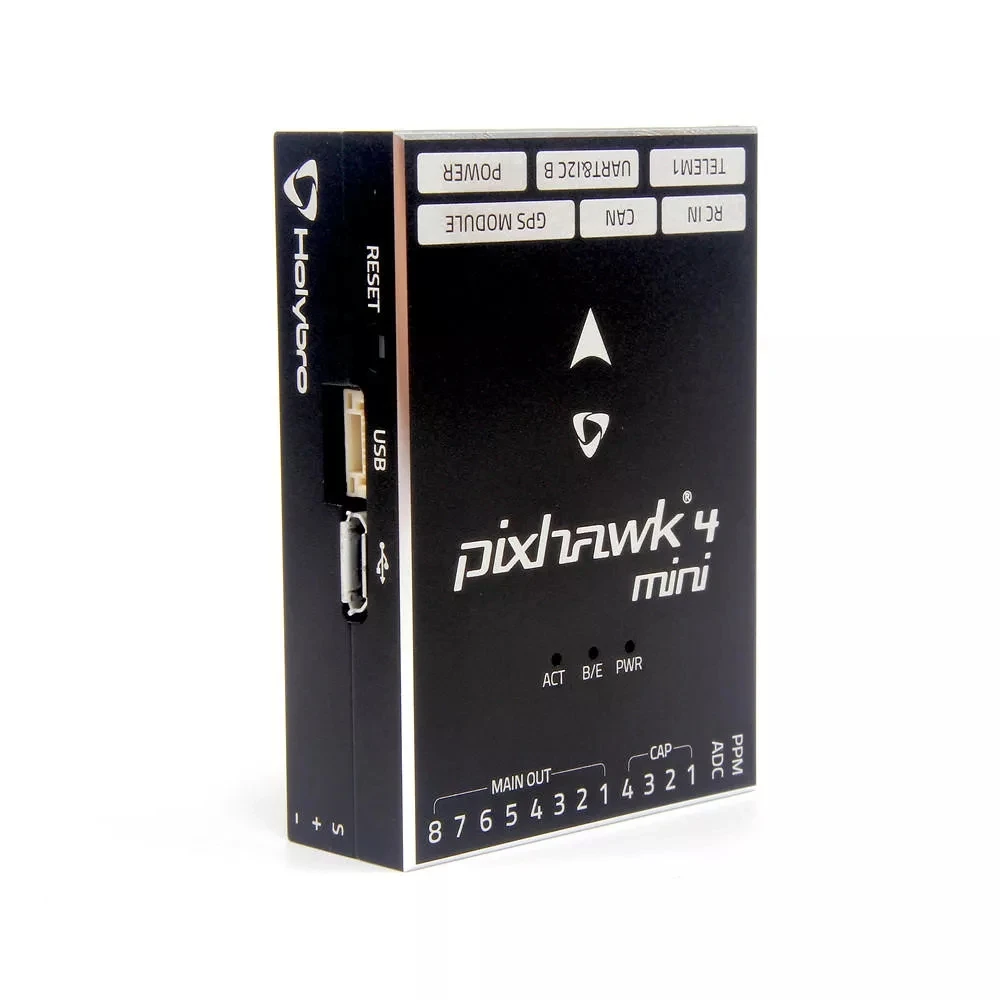
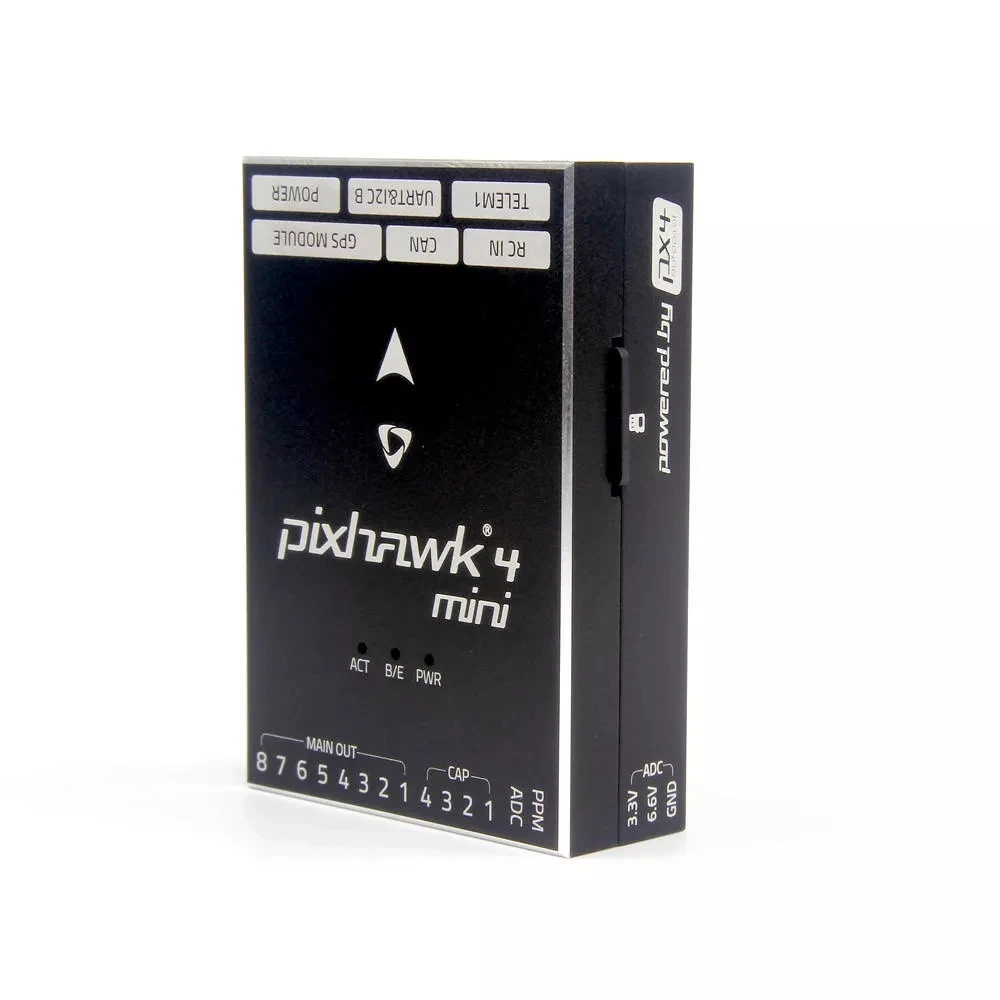
Den Pixhawk® 4 Mini autopilot er designet til ingeniører og hobbyfolk, der søger at udnytte kraften i Pixhawk 4, men arbejder med mindre droner.
Pixhawk 4 Mini tager FMU processor og hukommelse ressourcer fra Pixhawk 4 og samtidig fjerne grænseflader, der er normalt ubrugt.Dette gør det
Pixhawk 4 Mini til at være lille nok til at passe i en 250mm racer drone.
Pixhawk 4 Mini er designet og udviklet i samarbejde med Holybro® og Auterion®.Det er baseret på Pixhawk FMUv5 design standard og er optimeret
at køre PX4 flight control software.
Specifikation:
Flight controller:
Dimensioner: 38x55x15.5mm
Arbejdstemperatur: -40 ~ + 85°c
Vigtigste FMU Processor: STM32F765, 32-Bit Arm® Cortex®-M7, 216MHz, 2MB hukommelse, 512KB RAM
Indbyggede sensorer:
-Accel/Gyro: ICM-20689
-Accel/Gyro: BMI055
-Magnetometer: IST8310
-Barometer: MS5611
Grænseflader:
-8 PWM udgange
-4 dedikeret PWM/Capture input på FMU
-Dedikeret R/C input til CPPM
-Dedikeret R/C input til Spektrum / DSM og S. Bus med analog / PWM RSSI input
-3 til generelle formål serielle porte
-2 I2C-porte
-3 SPI busser
-1 CANBuses for, KAN ESC
-Analog input for spænding / strøm på batteri
-2 ekstra analog input
Power-System:
Power Brick Input: 4.75~5,5 V
USB Power Input: 4.75~5.25 V
Servo-Rail Input: 0~24V
Max nuværende sensing: 120A
GPS: ublox Neo-M8N GPS/GLONASS-modtager integreret magnetometer IST8310
PM06 magt bestyrelsen:
PCB Nuværende: 120A fortsat
UBEC Strøm: 3A Antal
Power input: DC 7V~42V(2S~10S)
Power output: DC 5.1 V~5.3 V
Dimensioner: 35x35x5mm
Monteringshul: 30.5 mm*30.5 mm
Vægt: 7g
Håndbog for pixhawk 4 mini, venligst klik her.
Pakke inkluderet:
1x Pixhawk 4 Mini flight controller
1x GPS modul
1x PM06 magt bestyrelsen
1x-kabel-sæt
Tags: radio telemetri, apm magt, gps autopilot vand, mavic mini protector, holybro kakute, pixhawk power modul, børsteløs dc-motor 12000rpm, holybro pixhawk, autopilot båd, gps pixhawk.
- Størrelse: 15*15
- Af Forbrugsstoffer: Slebede
- For Køretøj Type: Fly
- Fire-hjulstræk Egenskaber: Motorer
- Tekniske parametre: Værdi 2
- Materiale: Metal
- Model-Nummer: 0
- Fjernbetjeningen Peripherals/Enheder: Modtagere
- Oprindelse: KN(Oprindelse)
- Opgradering Af Reservedele/Tilbehør: Adapter
- Bruger: Biler & Fjernbetjening Legetøj
- RC Reservedele & Accs: Motor Komponenter
- Akselafstand: Skruer
Tilbehør
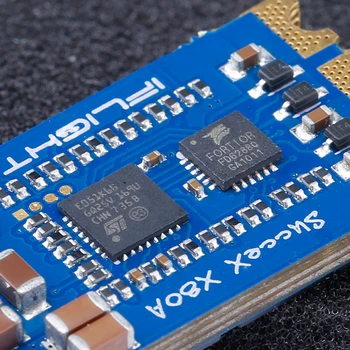 iFlight SucceX X80A 80A ESC 2-8, BLHeli-32-bit X-Class Enkelt ESC Støtte DShot150/300/600/1200/MultiShot/OneShot RC Drone FPV
PRODUKT BESKRIVELSE
SucceX X80A 32bit BLHeli Dshot1200 Enkelt ESC var designet til at give din motors jævn strøm med stor stabilitet og holdbarhed.32bit 48mHz STM32F051K66 MCU og 11 stykker TDK MLCC samlede 240UF Lav ESR kondensatorer bringe hurtigere-reaktion
iFlight SucceX X80A 80A ESC 2-8, BLHeli-32-bit X-Class Enkelt ESC Støtte DShot150/300/600/1200/MultiShot/OneShot RC Drone FPV
PRODUKT BESKRIVELSE
SucceX X80A 32bit BLHeli Dshot1200 Enkelt ESC var designet til at give din motors jævn strøm med stor stabilitet og holdbarhed.32bit 48mHz STM32F051K66 MCU og 11 stykker TDK MLCC samlede 240UF Lav ESR kondensatorer bringe hurtigere-reaktion 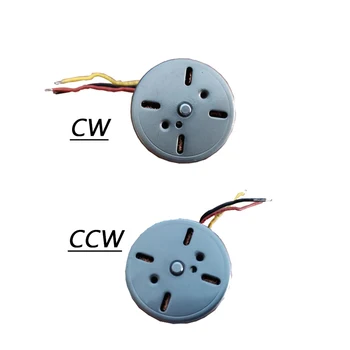 MJX Fejl 5W B5W RC Drone Reservedele Motor For B5W GPS Brushles Quadcopter, Reservedele, Tilbehør CW CCW Motor
MJX Fejl 5W B5W RC Drone Reservedele Motor For B5W GPS Brushles Quadcopter, Reservedele, Tilbehør CW CCW Motor  Nye DasMikro 2,4 G 8CH AFHDS Nano Overflade Modtager Das87 1/87 Dele
Varenavn: DasMikro 8 Kanal AFHDS Nano Overflade Modtager Kanaler: 8ch frekvensbånd: 2.4 GHz AFHDS Graduering: PWM Størrelse (W*Hx*D): 14 x 10 x 4 mm Vægt: 2g Funktioner: Standard-2.4 Ghz-8-Kanals Modtager til Flysky Senderen, der er kompatible med Flysky GT2B, GT3B, GT3C, i6, i10, T6, CT6B, TH9X 2,4 Ghz Senderen AFHDS
Nye DasMikro 2,4 G 8CH AFHDS Nano Overflade Modtager Das87 1/87 Dele
Varenavn: DasMikro 8 Kanal AFHDS Nano Overflade Modtager Kanaler: 8ch frekvensbånd: 2.4 GHz AFHDS Graduering: PWM Størrelse (W*Hx*D): 14 x 10 x 4 mm Vægt: 2g Funktioner: Standard-2.4 Ghz-8-Kanals Modtager til Flysky Senderen, der er kompatible med Flysky GT2B, GT3B, GT3C, i6, i10, T6, CT6B, TH9X 2,4 Ghz Senderen AFHDS 
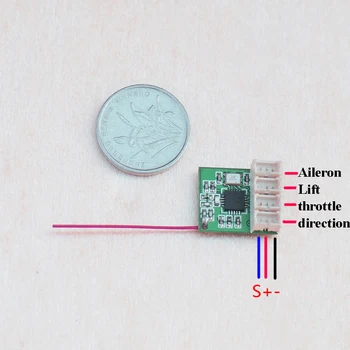 3.5 v-5,5 v Micro 2,4 G 4-KANALS Modtager Til RC Fly/Bil/båd/Robot/Tank Senderens Frekvens 2400-2540 MHZ Beskrivelse: 1.Kan strømforsynes fra en enkelt celle lithium batteri eller strøm fra 2S 3S ESC med bec 2.Velegnet til miniature-enheder 3.Velegnet til fjernstyring og kontrol fly, fjernbetjening køretøjer, fjernbetjening både, fjernbetjening robotter, fjernbetjening, tanke osv.Specifikation:
3.5 v-5,5 v Micro 2,4 G 4-KANALS Modtager Til RC Fly/Bil/båd/Robot/Tank Senderens Frekvens 2400-2540 MHZ Beskrivelse: 1.Kan strømforsynes fra en enkelt celle lithium batteri eller strøm fra 2S 3S ESC med bec 2.Velegnet til miniature-enheder 3.Velegnet til fjernstyring og kontrol fly, fjernbetjening køretøjer, fjernbetjening både, fjernbetjening robotter, fjernbetjening, tanke osv.Specifikation: